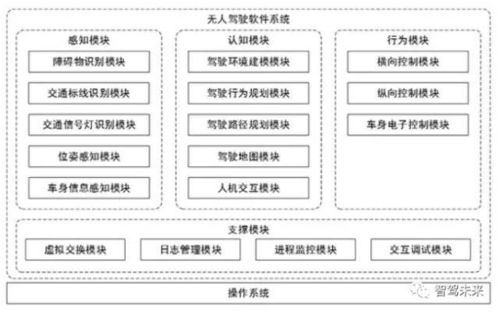
自动驾驶技术正以前所未有的速度重塑未来交通的图景,而其核心驱动力正是人工智能。从感知环境到决策规划,再到精准控制,人工智能基础软件在自动驾驶系统的每个环节都扮演着不可或缺的角色。本文将详细阐述人工智能在自动驾驶技术中的核心应用领域及其基础软件开发的关键所在。
一、 环境感知:汽车的“眼睛”与“大脑”
这是自动驾驶系统认知世界的第一步,主要依赖于计算机视觉、深度学习与传感器融合技术。
- 目标检测与识别:基于深度卷积神经网络(CNN)的模型,如YOLO、SSD、Faster R-CNN等,能够实时、准确地从摄像头图像中识别车辆、行人、交通标志、车道线等关键目标。基础软件开发的重点在于模型的高效部署、优化(如模型剪枝、量化)以及对不同光照、天气条件的鲁棒性提升。
- 语义分割与场景理解:通过语义分割网络(如DeepLab、U-Net),系统不仅能识别物体,还能理解每个像素的类别(道路、天空、建筑物等),构建出精细的环境语义地图,为路径规划提供依据。
- 多传感器融合:为了克服单一传感器的局限,基础软件需要开发先进的融合算法(如卡尔曼滤波、粒子滤波及基于深度学习的融合网络),将摄像头、激光雷达(LiDAR)、毫米波雷达和超声波雷达的数据在时间和空间上对齐、互补,生成更可靠、冗余的环境模型。
二、 定位与地图构建:高精度的“导航仪”
自动驾驶需要厘米级的定位精度,这依赖于AI与高精地图(HD Map)的紧密结合。
- 视觉/激光雷达SLAM:通过同步定位与地图构建技术,系统利用传感器数据实时推算自身位置并构建局部环境地图。基于深度学习的SLAM方法能更好地处理动态物体和场景变化,提高定位的稳定性和准确性。
- 高精地图匹配与更新:AI算法将实时感知数据与预存的高精地图进行匹配,实现精准定位。基于众包数据和在线学习,基础软件还需支持高精地图的动态元素(如临时路障、施工区)的实时更新。
三、 决策与规划:车辆的“决策中枢”
这是AI应用中最为复杂的部分,模拟人类的驾驶判断。
- 行为预测:利用循环神经网络(RNN)、长短期记忆网络(LSTM)、图神经网络(GNN)等模型,预测周围车辆、行人的未来轨迹和意图,这是做出安全决策的前提。
- 路径与运动规划:结合预测结果、交通规则和全局路径,规划出安全、舒适、高效的局部行驶轨迹。传统的基于搜索(如A*)和优化的方法,正越来越多地与强化学习、模仿学习等AI方法结合。强化学习尤其重要,它能让车辆通过与虚拟环境的不断交互试错,学会处理复杂、罕见的“长尾场景”。基础软件开发需构建高效的仿真平台和强大的决策模型训练框架。
四、 控制执行:精确的“手脚”
将规划好的轨迹转化为具体的油门、刹车和方向盘指令。虽然传统控制理论(如PID、模型预测控制MPC)仍是主流,但AI(特别是深度学习)被用于学习更优、更自适应(如适应不同车辆特性或路面摩擦)的控制策略,提升乘坐舒适性和能效。
五、 人工智能基础软件开发的核心挑战与趋势
自动驾驶AI软件的开发远非简单的模型训练,它是一个系统工程:
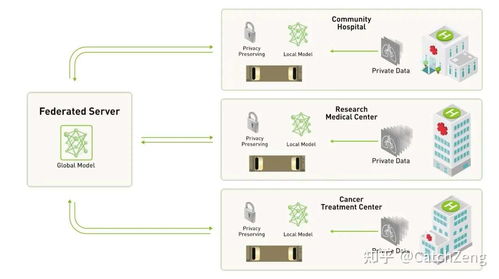
- 数据闭环与迭代:构建从数据采集、清洗、标注,到模型训练、仿真测试,再到车端部署、数据回传的完整闭环,是实现算法持续进化的生命线。
- 算力与效率优化:车端嵌入式平台算力有限,要求软件在算法精度与推理速度间取得平衡。模型压缩、硬件感知的神经网络架构搜索(NAS)、专用AI芯片(如NPU)的驱动开发是关键。
- 安全与可靠性:这是自动驾驶的命脉。软件开发必须遵循严格的功能安全标准(如ISO 26262),并融入预期功能安全(SOTIF)理念。需要开发冗余系统、故障检测机制以及可解释的AI(XAI)方法,以增加系统的透明度和可信度。
- 仿真与测试:海量的虚拟场景仿真(基于游戏引擎和物理模型)是测试AI决策算法、覆盖极端案例的主要手段,其逼真度和效率直接决定开发速度与系统安全性。
###
人工智能基础软件是自动驾驶技术的大脑与神经中枢。它融合了计算机视觉、深度学习、强化学习、传感器融合等多个前沿领域,其开发是一个涉及算法、系统工程、软硬件协同的巨大挑战。随着端云协同计算、大模型在自动驾驶领域的应用以及车路协同技术的发展,AI软件将变得更智能、更可靠,最终引领我们步入安全、高效的自动驾驶新时代。